Physicists at FAU demonstrate demixing behaviour of rotating particles
'Rotating robots move collectively
Physicists from Friedrich-Alexander-Universität Erlangen-Nürnberg and Heinrich-Heine Universität Düsseldorf have demonstrated that demixing occurs in systems made up of macroscopic particles rotating in opposite directions and that particles turning in either a clockwise or counter-clockwise direction form homogeneous groups. The researchers used miniature robots manufactured using 3D printing methods for their experiment. The results have now been published in the renowned journal Nature Communications (* doi: 10.1038/s41467-018-03154-7).
The phenomenon itself is well known. Biological organisms such as bacteria and artificial active particles tend to organise themselves into swarms and patterns. However, how this self-organising works and which forces are involved has not yet been researched to a great extent. Experiments on the dynamics of microscopic particles are difficult to conduct and the scope of simulations is limited because fundamental interaction mechanisms are not yet understood.
Vibration causes mini robots to rotate
Physicists at FAU and the University of Düsseldorf have now managed to observe how rotating particles self-organise during experiments. To do so, they placed small robots each measuring around 1.5 centimetres in size and equipped with seven tilted legs on a vibrating baseplate. The legs act as elastic springs and convert the vibration impulse into rotating movement. To enhance interactions, the robots, manufactured using 3D printers, were equipped with four splines making them behave like gear wheels that mesh. ‘Our setup is actually quite simple’, explains Prof. Thorsten Pöschel from the Institute of Multiscale Simulation at FAU. ‘We placed 210 rotors spinning in a clockwise direction and 210 rotors spinning in a counter-clockwise direction in a ring in a fully-mixed chequerboard configuration. We switched on the vibrating table and observed what happened.’
Meshing particles stick together
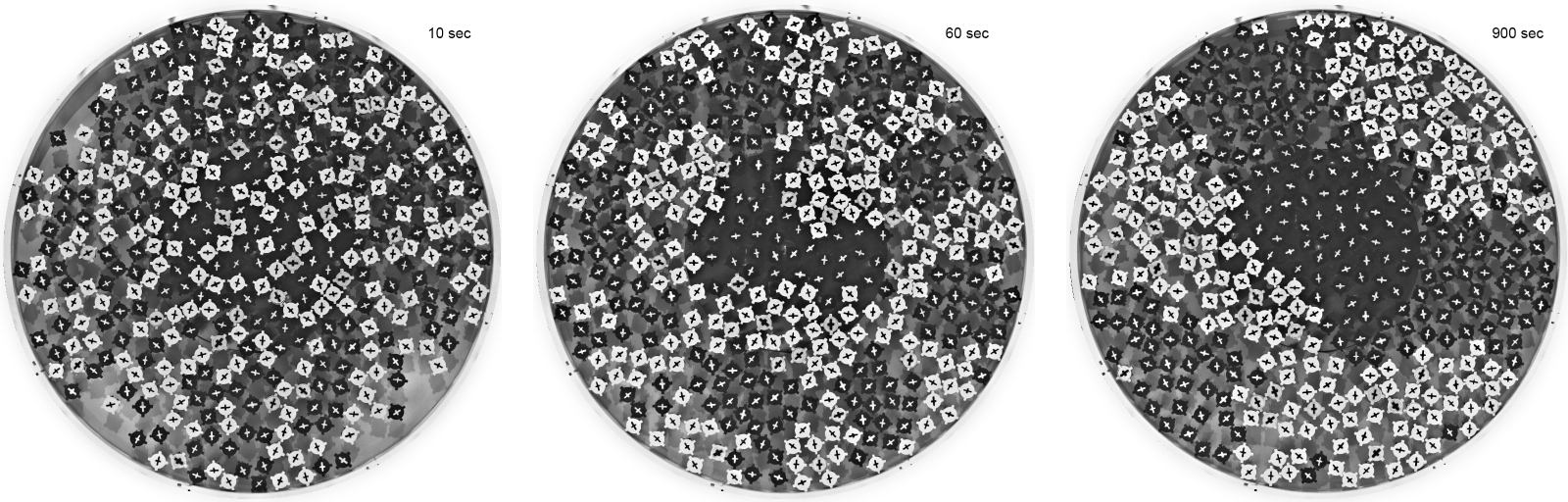
The researchers were surprised by the results: single domains were clearly visible after only one minute, and after 15 minutes, the robots had almost entirely demixed. ‘This segmentation is not intuitive’, says Dr. Christian Scholz from the Institute for Theoretical Physics II at Heinrich-Heine Universität Düsseldorf. ‘We could have expected that especially particles that rotate in opposite directions stay together because their splines don’t interlock – similar to a chain of rotating gear wheels that rotate alternately to the right or to the left.’ The opposite is true, however. Rotors that rotate in the same direction interlock and form groups. By tracking the individual robots, the researchers observed super-diffusive edge currents – particles near interfaces are more mobile than those in the centre of the domains.
Simulations confirm results of the experiment
Numerous repetitions show that the results of the experiment are very robust – the rotors had formed mostly three or four separate domains after 1000 seconds of vibration. Simulations on the basis of Langevin equations always show complete demixing into two groups. ‘The fact that the variations during the tests were greater than those in the simulation could have been caused by imperfections in the shape of our rotors printed using 3D printers and by the influence of gravity as we aren’t able to align the vibrating table in a completely horizontal position,’ explains Prof. Dr. Michael Engel from the Institute of Multiscale Simulation at FAU.
Both the experimental approach using physical rotors and the Langevin simulations are well-suited for describing the collective dynamics and the phase separation of rotating particles. The researchers hope to make a contribution to further research in active soft matter and microscopic or even molecular particles. The results of the project have been published under the title ‘Rotating robots move collectively and self-organize’ in the renowned journal Nature Communications.
Contact:
Prof. Dr. Thorsten Pöschel
Phone: +49 913185-20865
thorsten.poeschel@fau.de